


I’ve been watching the tech and automotive sectors collide for decades, and if there is one structural constant I've observed, it is this: when traditional hardware companies attempt to build highly complex software, they almost always misjudge the architecture. Right now, the global automotive sector is driving itself straight into an intellectual and financial brick wall.
The industry is currently suffering from a profound architectural delusion - what I call the Agentic AI Fallacy. Car companies are spending billions advertising partial automation systems as if they possess actual reasoning intelligence. They are confusing the execution layer of vehicle robotics with the cognitive layer of true agentic AI. By conflating systems that merely execute pre-programmed kinematic decisions with systems capable of goal-directed, contextual reasoning, original equipment manufacturers (OEMs) are creating immense liability, delaying actual breakthroughs, and putting lives at risk on public roads.
The Anatomy of the Fallacy and the Execution Chasm
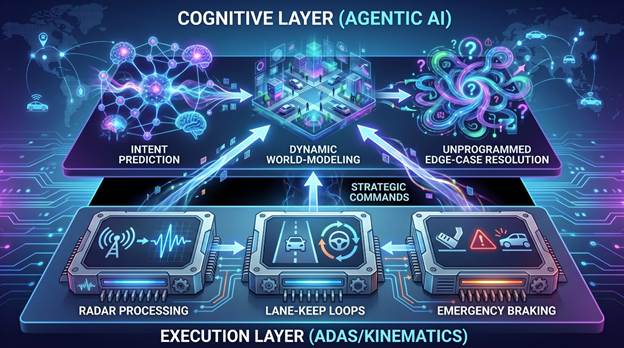
To understand why this is a mounting engineering disaster, you have to separate a modern vehicle’s technical architecture into its actual functional layers. The automotive industry largely behaves as though autonomous driving is a single, continuous line of incremental software updates. It isn’t. There is a massive, structural chasm between execution-layer automation and cognitive-layer intelligence, and bridging that gap requires entirely different design paradigms.
The execution layer is what powers current Advanced Driver Assistance Systems (ADAS). These are traditional, reactive control loops. They take sensor data—from cameras, radar, or LiDAR—and run it through mathematical algorithms to perform specific, deterministic tasks. When a Lane Keeping Assist system nudges a vehicle back into its lane, or an Adaptive Cruise Control drops speed to match a forward vehicle, it is operating on rigid, programmed rules. The system isn't "thinking." It has no concept of what a road actually is; it is simply trying to keep a set of numerical inputs within defined tolerances to maintain baseline AI safety in automated driving.
True agentic AI belongs entirely to the cognitive layer. An "agent" is an AI system designed with a high degree of autonomy, possessing the ability to understand abstract goals, analyze novel situations, build an internal model of the world, and make independent choices to solve complex problems without explicit human programming.
When a human drives, they aren't just calculating the distance to the next bumper. They are actively predicting whether a teenager standing on a curb is looking at their phone or about to step into traffic. They notice a construction zone and immediately look for alternative paths or hand gestures from a worker. This fluid, contextual reasoning is what separates a machine that blindly follows a painted line from an agent that actually navigates a dynamic world.
The industry's fatal flaw is believing that if they just make the execution layer faster and feed it more video data, it will magically transform into a cognitive agent. It won't. You cannot build a ladder to the moon, no matter how many rungs you add.
Where the Market Stands on Real Autonomy
When we evaluate the current autonomous landscape, the gap between company messaging and technical reality is wider than it has ever been. The market is split violently into companies deploying genuine, geofenced cognitive architectures and those selling glorified execution loops wrapped in aggressive marketing.
Alphabet’s Waymo is the clear leader in true autonomous operation. Waymo understood early on that to achieve safe operation without a human fallback, the vehicle must possess an advanced cognitive layer capable of predicting multi-actor interactions in dense urban areas. By constraining their operational design domains, they have successfully managed the rigid boundaries required for safe autonomous driving. As a result, they have deployed massive fleets safely, logging millions of commercial robotaxi trips in complex metros. Waymo is building an actual agentic driver, and it shows in their relative stability.
On the other end of the spectrum is Tesla. Tesla’s marketing of "Full Self-Driving" (Supervised) is arguably the most glaring example of the Agentic AI Fallacy in the wild. Despite the ambitious naming convention, the software remains an advanced Level 2 system under the official SAE J3016 standard, requiring constant human monitoring. Tesla relies primarily on end-to-end neural network models. While its execution layer is incredibly impressive - frequently mimicking human driving behaviors through deep pattern matching - it fundamentally lacks an underlying symbolic or cognitive model to reason through complex interactions with vulnerable road users. When it encounters something entirely outside its training data, it doesn't reason; it simply guesses based on pixel configurations, often resulting in erratic disengagements.
Legacy giants like General Motors with Cruise, and Ford with Argo AI (before its shuttering), have suffered massive setbacks by underestimating the sheer hostility of real-world edge cases. Cruise's high-profile groundings illustrated that while their execution systems could navigate predictable routes, their cognitive layer struggled with chaotic, high-stress variables—such as responding appropriately to emergency vehicles or managing the chaotic aftermath of post-collision scenarios.

The Back-Story Behind the Engineering Struggle
To understand why automotive OEMs are making such a mess of this transition, you have to look at their history. For over a century, car companies have been mechanical engineering powerhouses. Their entire corporate culture, supply chain, and quality assurance methods are built around hardware manufacturing.
In the hardware world, you design a part, stress-test it over millions of cycles, freeze the specification, and mass-produce it. If a component meets the engineering drawings, it is deemed safe. This deterministic mindset works beautifully for stamping steel panels or casting engine blocks. It is completely useless for building cognitive software.
Traditional carmakers do not possess the native culture required to develop cutting-edge artificial intelligence. They treat software development as a tier-2 component procurement problem. They write massive, rigid specification documents and outsource the code to massive global engineering firms.
When these companies attempt to build autonomous systems, they treat it like a traditional ADAS feature—like anti-lock brakes (ABS). They assume that if they write enough code and string together enough deterministic rules, the car will eventually be able to handle any situation. They do not understand the fundamental ontology of autonomous driving, which dictates that an autonomous car must operate in a highly probabilistic environment where it has to constantly negotiate with human irrationality.
The Dangerous Consequences of Confusing Execution with Cognition
When an automotive OEM fails to see the difference between these two layers, the consequences are immediate, predictable, and occasionally fatal.
First, it creates a deadly psychological phenomenon known as automation complacency. When an execution-layer system performs flawlessly 99% of the time on a sunny highway, the human driver naturally assumes the car possesses a cognitive layer. They take their hands off the wheel, look down at their phone, and mentally disengage. But because the system is just an execution loop, it lacks a fallback mechanism to guarantee automated driving safety in that 1% edge case—a stopped fire truck, a uniquely shaped construction cone, or blinding glare. By the time the car realizes its rules don't apply and alerts the driver to take over, the driver cannot regain situational awareness fast enough. Regulatory bodies have extensively documented these failures when trying to define driver models for automated vehicles in international regulations.
Second, this confusion is leading to a regulatory and legal nightmare. When a car with a basic execution loop crashes because it misidentified an obstacle, who is responsible? The OEM blames the human for not paying attention, pointing to the fine print in the owner's manual. But their marketing told a completely different story. This duplicity is destroying consumer confidence, which will ultimately delay the widespread adoption and regulatory trust in autonomous vehicles.

How Automotive OEMs Must Correct the Course
If carmakers want to survive the next decade, they must radically change how they talk about, design, and implement vehicle intelligence.
- Honest Architectural Labeling: OEMs must immediately stop using deceptive marketing terms like "Self-Driving," "Autopilot," or "Pilot Assist" for systems that require human supervision. They need to ground their messaging strictly in established industry standards. The SAE J3016 framework for driving automation must be the bible here, making it explicitly clear to consumers that Level 2 is driver assistance, not vehicle autonomy.
- Architectural Decoupling: Car companies must separate their software stacks into two isolated domains. The execution layer must remain a highly stable, secure, deterministic safety net handling braking, steering, and immediate object avoidance. This is essential for infrastructure-assisted automated driving functions. The cognitive layer must sit above it as a distinct, agentic intelligence platform running on advanced neural hardware, responsible exclusively for high-level scene understanding, intent prediction, and strategic path planning.
- Embracing a Digital-First Culture: Legacy OEMs must stop trying to build advanced AI using traditional automotive management structures. They need to spin out their software divisions into independent, well-funded technology entities that can attract top-tier AI talent and operate with the agility of a Silicon Valley firm, rather than a slow-moving manufacturing giant.
The Real Timeline for Trusting Our Cars
So, when will we actually be able to buy a car, climb into the back seat, fall asleep, and trust it to take us across the country?
We are still a long way off from unconstrained, universal Level 5 autonomy. Navigating any road, anywhere, in any weather condition requires an AI agent with a level of generalized intelligence and situational awareness that simply does not exist yet. It requires a machine capable of reasoning on par with a human adult.
However, highly trusted, restricted SAE Level 4 autonomy is already arriving in specific environments. We will continue to see the expansion of driverless robotaxi networks in geofenced, well-mapped urban areas and dedicated commercial trucking lanes over the next three to five years.
For personally owned consumer vehicles, true "eyes-off, mind-off" highway autonomy (Level 3 or constrained Level 4) will likely become widely available and trustworthy by the early 2030s, reshaping transport planning and vehicle implementation. But that timeline depends entirely on the industry abandoning its current illusions, accepting the reality of the software stack, and designing true cognitive agents rather than over-hyped lane-keep systems.
Wrapping Up
The automotive industry is currently caught in a dangerous marketing loop, continually substituting aggressive sales pitches for sound software engineering. By treating execution-layer automation as if it were cognitive-layer agentic AI, carmakers are confusing consumers and building inherently flawed systems. Driving isn't merely a math problem of lane-keeping and velocity matching; it is an incredibly complex social interaction that requires real-time reasoning, prediction, and contextual understanding. Until the automotive sector stops falling for its own marketing hype, separates its control loops from true agentic intelligence, and builds legitimate cognitive architectures, the promise of true autonomous driving will remain stuck in park.
Return tomorrow, or check our Torque News Home Page for more interesting automotive news articles.
Disclosure: Images rendered by Artlist.io
About The Author
Rob Enderle is a technology analyst at Torque News who covers automotive technology and battery developments. You can learn more about Rob on Wikipedia and follow his articles on TechNewsWord, TGDaily, and TechSpective.
Set Torque News as Preferred Source on Google
Follow us today...








